 |
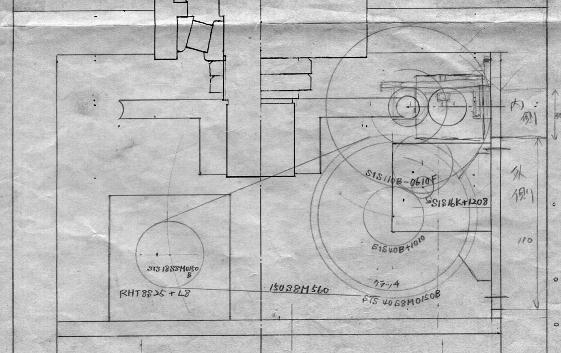
| 今月は、先月まで紹介したバランスウェイトハウジングの全体構造です。 3枚の仕切板によって、2つの部屋ができています。上の部屋が、赤緯駆動系の入る部分(下図参照)、下の部屋がバランスウェイトが入る部分です。 図でわかるように、上の部屋のセンター(赤緯軸のセンター)と下の部屋のセンター(バランウェイトのセンター)は同一ではありません。これは、赤緯軸駆動系、特にウォームギアの部分が広い空間を必要としたことと、バランスウェイトの荷重が、少しでも赤道儀ピラー方向へかかるようにと考えたからです。 バランスウェイトは寸切りを2つのピローブロックベアリングで支えています。バランスウェイトはΦ200の丸鋼を50mm厚で切り出し、センターに20Φの穴を開けた後、2分割して、寸切りに合わせて作ったアダプターにはめ込んで使用します。こうしないと、狭いハウジングの中で、取り外しができませんでした。 下の部屋に見える点線は、バランスウェイトが回転してしまうのを防止する丸棒です。これにより、寸切りを回転することでバランスウェイトの上下が可能です。 この部分は、来月写真で紹介します。 |