 |
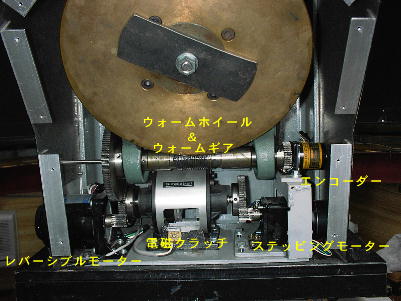
| 今回も引き続き赤経軸の駆動系について説明します。 先回はとても解りにくい図面でしたので、今回は実際の位置関係を写真で紹介します。 通常のガイド速運転中は、接続状態の(電流の流れている)電磁クラッチを介して、ステッピングモーターからクラッチ左側のギア、ウォームギア左側のギア、ウォームギアと伝わります。 高速運転時には、電磁クラッチは解除(ステッピングモーターと分離)され、左端のレバーシブルモーターから、クラッチ左側のギア、ウォームギア左側のギア、ウォームギアと伝わります。 ウォームギア右端には、オムロン製のロータリーエンコーダーが付きます。この取り付けには非常に苦しんだ挙げ句、ステッピングモーターをまたぐようにステーを取り付け、その上に乗せました。このエンコーダーと赤緯側のエンコーダーは、観測室床の裏を通って、アストロスケールに接続されています。 |
